



The example below is only one way how to set up the Relay Module.
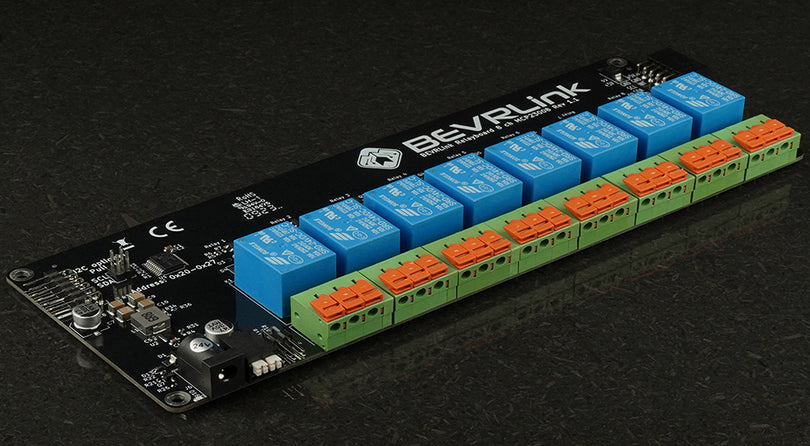
In this examples we have connected a PICO to the BEVRLink Manager PICO V2 with BEVRLink 8 Channel Relay V1 12V. With this relay module board you need the BEVRLink Power Supply 12V 2A.
Optional for a safe setup we recommend to use case for both the manager and relay boards: BEVRLink Cases
Set up CircuitPython
- Download latest CircuitPython Firmware
- Hold BOOTSEL while plugging the PICO in to your PC
- A USB Drive called RPI-RP2 should appear on your computer
- Drag and drop the downloaded UF2 to the Drive
- The board will automatically flash it self and reboot removing the drive
- You will get a new USB Drive attached called CIRCUITPY that will hold your code and files
Code
- First download the library for MCP23008
- Unzip and copy the folder adafruit_mcp230xx to the lib folder on the PICO
- Write the code in a code.py file
import time
import board
import busio
import digitalio
from adafruit_mcp230xx.mcp23008 import MCP23008
# Initialize the I2C bus:
i2cbus = busio.I2C(scl=board.GP1, sda=board.GP0)
# Create an instance of either the MCP23008 or MCP23017 class depending on
# which chip you're using:
r1 = MCP23008(i2cbus, 0x20) # Address of relay card 1
r2 = MCP23008(i2cbus, 0x21) # Address of relay expansion card
# Make a list of all the pins
r1_pins = []
for pin in range(0, 8):
r1_pins.append(r1.get_pin(pin))
r2_pins = []
for pin in range(0, 8):
r2_pins.append(r2.get_pin(pin))
# Set all the pins to output
for pin in r1_pins:
pin.direction = digitalio.Direction.OUTPUT
for pin in r2_pins:
pin.direction = digitalio.Direction.OUTPUT
while True: # Loop
# Turn on each relay for one second
for pin in r1_pins:
pin.value = True # turn LED on!
time.sleep(1) # wait 0.1 seconds
pin.value = False # turn LED off
time.sleep(1) # wait 0.1 seconds
for pin in r2_pins:
pin.value = True # turn LED on!
time.sleep(1) # wait 0.1 seconds
pin.value = False # turn LED off
time.sleep(1) # wait 0.1 seconds
Copy the code file code.py to the USB drive CIRCUITPY.
The code should autorun as soon as it saved on the drive, otherwise open a serial connection to the Pico shell and check for errors